Robot Web Tools for Rover Control
March 21, 2015
Overview
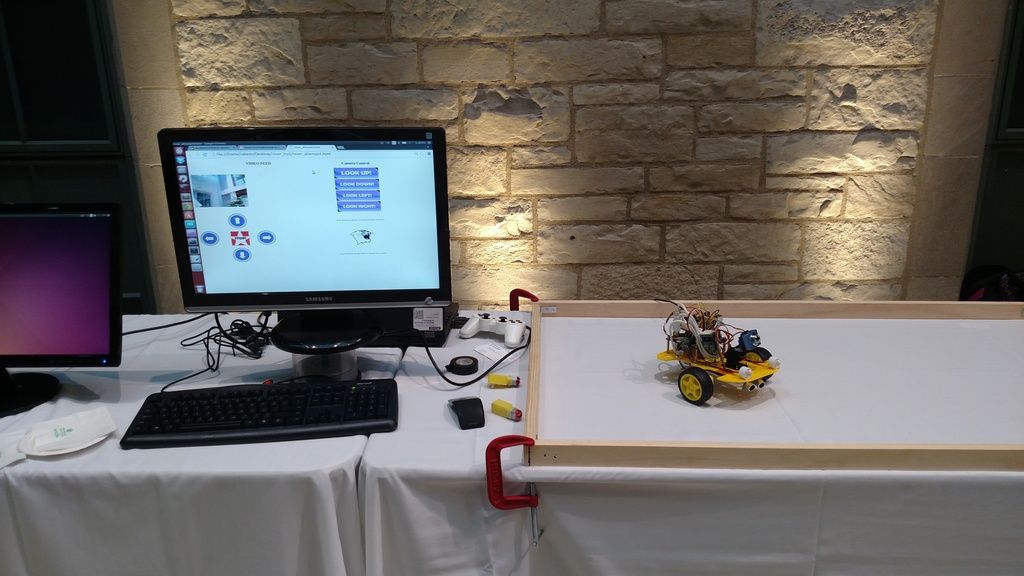
The goal of this project is to control a microcontroller-based rover through an obstacle course with ROS by user input (Leap Motion, Joystick, keyboard, etc.) remotely using a web interface.
In particular, this involved using rosserial for communication of the computer with the microcontroller. Next, I had to gain a base level knowledge of html/css in order to build a web interface to control the robot.
Major steps involved:
- Setting up microcontroller and ROS communication through rosserial
- Write an Arduino sketch that is subscribed to a topic that will change the state of an LED when a particular letter is published to it
- Creating a rover teleop package
- Begin with writing a keyboard teleop package
- Then, modify the package so it can be controlled with a joystick or a web interface
- Get feed from webcam on the rover
- Use OpenCV to stream video from webcam to a ROS topic
- Interfacing with robot web tools
- Start with getting the video feed to show up on the website
- Add arrow buttons to control movement of the rover, and the rover’s camera servos
- Lastly, add controls for headlights, as well as error messages for approaching an obstacle using data from the ultrasonic sensor